
EECS149 Course Project: Hexapod Robot
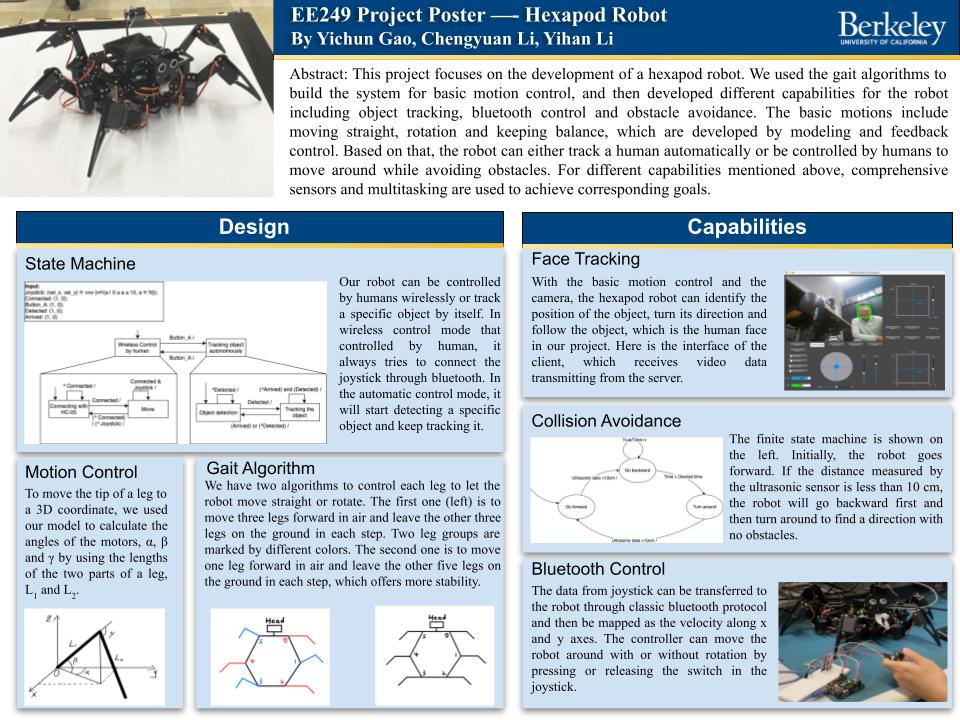
Here is the course project for Berkeley EECS 149/249. This project focuses on the development of a hexapod robot. We used the gait algorithms to build the system for basic motion control, and then developed different capabilities for the robot including object tracking, bluetooth control and obstacle avoidance. The basic motions include moving straight, rotation and keeping balance, which are developed by modeling and feedback control. Based on that, the robot can either track a human automatically or be controlled by humans to move around while avoiding obstacles. For different capabilities mentioned above, comprehensive sensors and multitasking are used to achieve corresponding goals.
I was responsible for part of the hardware, part of the motion control and obstacle avoidance of the robot in this project.
Here is the poster of our project:
And the full report of the project can be found here